ODE-Solvers from Scratch¶
All the other tutorials show how to use the ODE-solver with the probsolve_ivp function. This is great, though probnum has more customisation to offer.
[1]:
from probnum import diffeq, filtsmooth, statespace, randvars
import numpy as np
import matplotlib.pyplot as plt
plt.style.use("../../probnum.mplstyle")
First we define the ODE problem. As always, we use Lotka-Volterra. Once the ODE functions are defined, they are gathered in an IVP object.
[3]:
def f(t, y):
y1, y2 = y
return np.array([0.5 * y1 - 0.05 * y1 * y2, -0.5 * y2 + 0.05 * y1 * y2])
def df(t, y):
y1, y2 = y
return np.array([[0.5 - 0.05 * y2, -0.05 * y1], [0.05 * y2, -0.5 + 0.05 * y1]])
t0 = 0.
tmax = 20.
y0 = np.array([20, 20])
ivp = diffeq.IVP((t0, tmax), initrv=randvars.Constant(y0), rhs=f, jac=df)
Next, we define a prior distribution and a measurement model. The former can be any Integrator, which currently restricts the choice to IBM, IOUP, and Matern. We usually recommend IBM. The measurement model requires a choice between EK0, EK1 (extended Kalman filters of order 0 or 1, respectively) and perhaps UK (unscented Kalman filter). The use of the latter is discouraged, because the square-root implementation is not available currently.
The measurement model can either be constructed with DiscreteEKFComponent.from_ode or, perhaps more conveniently, with GaussianIVPFilter.string_to_measurement_model.
[4]:
prior = statespace.IBM(ordint=4, spatialdim=ivp.dimension, forward_implementation="sqrt", backward_implementation="sqrt")
ekf = diffeq.GaussianIVPFilter.string_to_measurement_model("EK1", ivp=ivp, prior=prior)
Next, we construct the ODE filter. One choice that has not been made yet is the initialiation strategy. The current default choice is to initialise by fitting the prior to a few steps of a Runge-Kutta solution. An alternative is to use automatic differentiation, which is currently in development. An easy-access version of those initialisation strategies is to use the constructor GaussianIVPFilter.construct_with_rk_init.
[5]:
solver = diffeq.GaussianIVPFilter.construct_with_rk_init(ivp, prior=prior, measurement_model=ekf, with_smoothing=True)
Now we can solve the ODE. To this end, define a StepRule, e.g. ConstantSteps or AdaptiveSteps. If you don’t know which firststep to use, the function propose_firststep makes an educated guess for you.
[6]:
firststep = diffeq.propose_firststep(ivp)
steprule = diffeq.AdaptiveSteps(firststep=firststep, atol=1e-2, rtol=1e-2)
odesol = solver.solve(steprule=steprule)
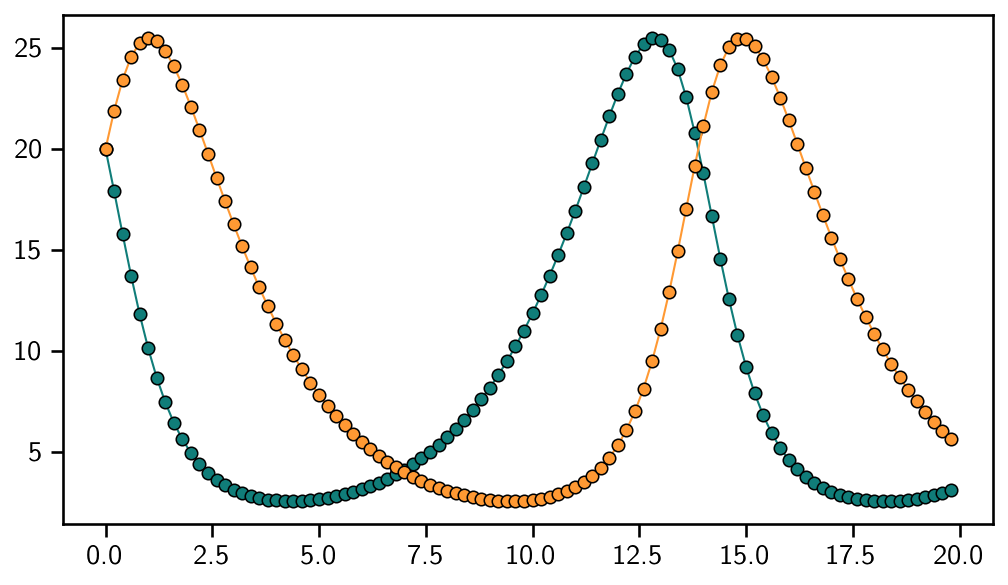
GaussianIVPFilter.solve returns an ODESolution object, which is sliceable and callable. The latter can be used to plot the solution on a uniform grid, even though the solution was computed on an adaptive grid. Be careful: the return values of __call__, etc., are always random variable-like objects. We decide to plot the mean.
[7]:
evalgrid = np.arange(ivp.t0, ivp.tmax, step=0.2)
Done! This is the solution to the Lotka-Volterra model.
[8]:
sol = odesol(evalgrid)
plt.plot(evalgrid, sol.mean, "o-", linewidth=1)
plt.show()
[ ]:
[ ]:
[ ]: